About Me
Hi, I am Xingcheng Zhou. I joined the Chair of Robotics, Artificial Intelligence and Real time Systems at Technical University of Munich in 2023 as a Research Associate, working under the supervision of Prof. Dr. Ing. habil. Alois Christian Knoll.
My research interests include Vision Language Models, 3D Environment Perception, Scene Understanding, World Models and related areas.
I completed my M.Sc. in Electrical and Computer Engineering at the Technical University of Munich in 2021. Before joining TUM, I worked as an Industrial AI Researcher at Siemens.
News
| Jan 2026 | I will be heading to Singapore 20th-24th January for AAAI 2026! Feel free to reach out and catch up! |
| Nov 2025 | One paper accepted by AAAI 2026 in Singapore! |
| May 2025 | One paper accepted by ICML 2025 in Vancouver, Canada! |
| Jul 2024 | One paper accepted by IEEE-ITSC 2024 in Edmonton, Canada! |
| May 2024 | One paper accepted by T-IV. One paper accepted by CVPR 2024! |
| May 2023 | I start my PhD at TUM Chair of Robotics, Artificial Intelligence and Real time Systems! |
| Jun 2021 | Completed my M.Sc. thesis "Real-Time LiDAR-Based 3D Object Detection on the Highway" at TUM! |
Selected Publications
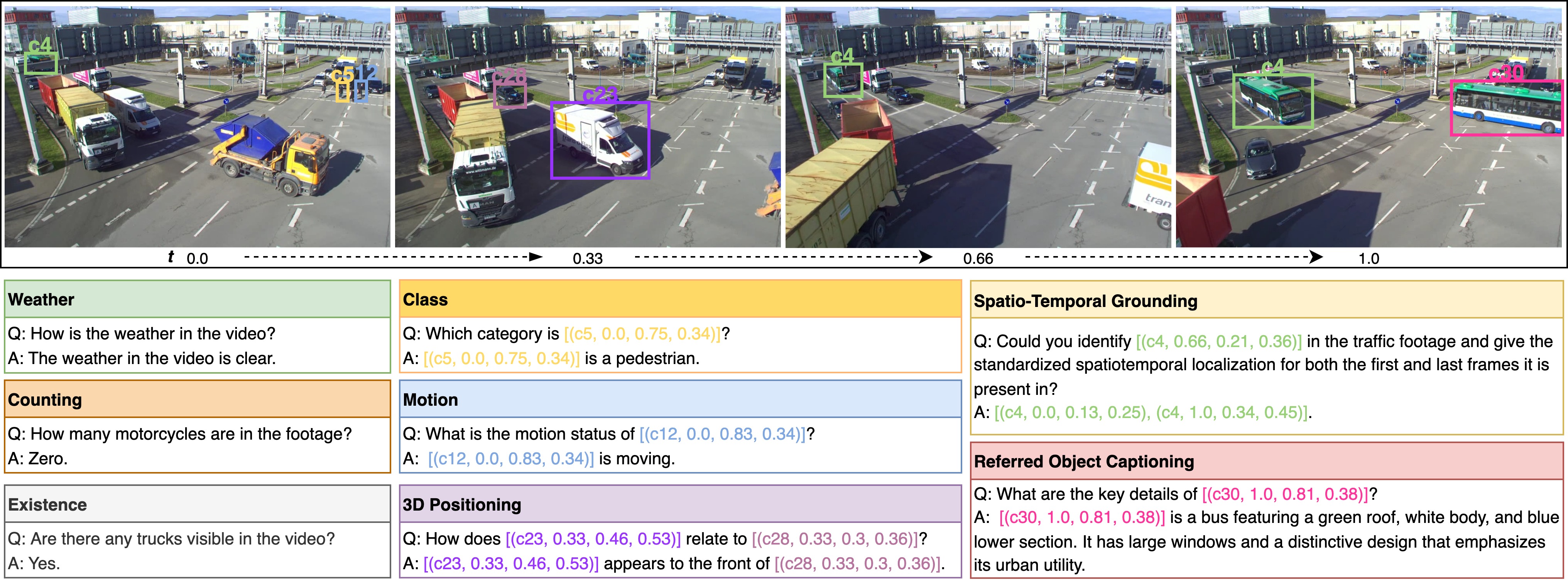
TUMTraffic VideoQA: A Benchmark for Unified Spatio-Temporal Video Understanding in Traffic Scenes
Xingcheng Zhou, Konstantinos Larintzakis, Hao Guo, Walter Zimmer, Mingyu Liu, Hu Cao, Jiajie Zhang, Venkatnarayanan Lakshminarasimhan, Leah Strand, Alois C Knoll
ICML-2025 Main Track, 2025
National Projects


Providentia++
Time: Oct 2020 to Jun 2021
Funder: Federal Ministry of Transport and Intelligent Infrastructure BMVI
Design and implement real time 3D object detection for roadside LiDAR on highways.
Academic Service
Workshops
Reviewer
CVPRICCVAAAIITSCIVIROSICRARA-LTRBT-IVT-ITS